# =============================================================================
# Heterogeneous Kuramoto Network
# =============================================================================
# Source: https://juliadynamics.github.io/NetworkDynamics.jl/stable/generated/heterogeneous_system/
#
# Three different vertex types on the same graph:
# 1. Kuramoto oscillator (nodes 2-4, 6-8): dtheta/dt = omega0 + esum
# 2. Static node (node 1): output = theta_fix (no state variables)
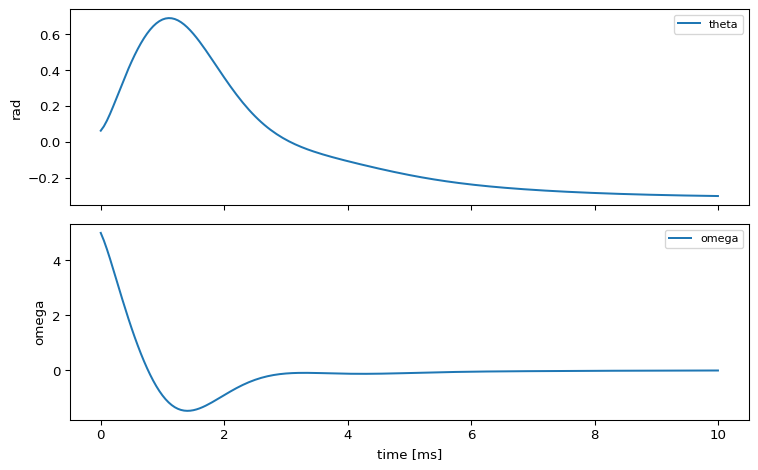
# 3. Kuramoto with inertia (node 5): 2D system with damping
#
# All vertices are coupled via K sin(theta_src - theta_dst).
# =============================================================================
id: 104
label: "Heterogeneous Kuramoto Network"
description: >
Kuramoto oscillators with three vertex types: standard Kuramoto oscillators
(6 nodes), one static node with fixed phase output, and one oscillator
with inertia (second-order dynamics). Demonstrates heterogeneous vertex
assignment on a Watts-Strogatz ring network.
Recreates the NetworkDynamics.jl Heterogeneous System tutorial.
references:
- "https://juliadynamics.github.io/NetworkDynamics.jl/stable/generated/heterogeneous_system/"
- "Kuramoto, Y. (1975). Self-entrainment of a population of coupled non-linear oscillators."
# -- Default (most common) vertex dynamics ------------------------------------
dynamics:
name: Kuramoto
label: "Kuramoto phase oscillator"
description: >
Standard Kuramoto oscillator: dtheta/dt = omega0 + esum.
Output (coupling variable) is theta.
system_type: continuous
autonomous: true
parameters:
omega0:
label: "Natural frequency"
symbol: "omega_0"
value: 0.0
unit: "rad/s"
description: "Intrinsic angular frequency of the oscillator"
coupling_terms:
c_coupling:
description: "Aggregated sinusoidal coupling from incident edges"
state_variables:
theta:
label: "Phase angle"
symbol: "theta"
equation:
rhs: "omega0 + c_coupling"
initial_value: 0.0
unit: "rad"
coupling_variable: true
variable_of_interest: true
# -- Network -------------------------------------------------------------------
network:
label: "8-node ring (Watts-Strogatz k=2, p=0)"
description: >
Regular ring lattice: each node connected to 2 nearest neighbours.
Equivalent to watts_strogatz(8, 2, 0) in Graphs.jl.
number_of_nodes: 8
graph_generator:
name: watts_strogatz
type: WattsStrogatz
parameters:
k: { name: k, value: 2 }
p: { name: p, value: 0 }
# -- Additional vertex dynamics models ----------------------------------------
dynamics:
StaticNode:
name: StaticNode
label: "Static vertex"
description: >
No internal dynamics. Outputs a fixed phase value theta_fix as
its coupling output. Used for boundary conditions or fixed
reference oscillators. Has no state variables — it is a pure
algebraic output node (ND.jl: ff=NoFeedForward()).
system_type: continuous
autonomous: true
parameters:
theta_fix:
label: "Fixed phase output"
symbol: "theta_fix"
value: -0.4375
unit: "rad"
description: "Constant phase output of this vertex"
coupling_terms: {}
state_variables: {}
KuramotoInertia:
name: KuramotoInertia
label: "Kuramoto oscillator with inertia"
description: >
Second-order Kuramoto oscillator with damping:
dtheta/dt = omega, domega/dt = omega0 - 1.0*omega + esum.
Only theta is the coupling output (g=1:1 in ND.jl).
system_type: continuous
autonomous: true
parameters:
omega0:
label: "Natural frequency"
symbol: "omega_0"
value: 0.0
unit: "rad/s"
description: "Intrinsic angular frequency"
coupling_terms:
c_coupling:
description: "Aggregated sinusoidal coupling from incident edges"
state_variables:
theta:
label: "Phase angle"
symbol: "theta"
equation:
rhs: "omega"
initial_value: 0.0
unit: "rad"
coupling_variable: true
variable_of_interest: true
omega:
label: "Angular velocity"
symbol: "omega"
equation:
rhs: "omega0 - 1.0*omega + c_coupling"
initial_value: 5.0
unit: "rad/s"
variable_of_interest: true
nodes:
# Node 1: static vertex (fixed phase output)
- id: 0
label: "Static node"
dynamics: StaticNode
parameters:
- name: theta_fix
value: -0.4375
# Nodes 2-4: standard Kuramoto
- id: 1
dynamics: Kuramoto
parameters:
- name: omega0
value: -0.3125
state:
theta: -0.3125
- id: 2
dynamics: Kuramoto
parameters:
- name: omega0
value: -0.1875
state:
theta: -0.1875
- id: 3
dynamics: Kuramoto
parameters:
- name: omega0
value: -0.0625
state:
theta: -0.0625
# Node 5: Kuramoto with inertia (2D)
- id: 4
dynamics: KuramotoInertia
parameters:
- name: omega0
value: 0.0625
state:
theta: 0.0625
omega: 5.0
# Nodes 6-8: standard Kuramoto
- id: 5
dynamics: Kuramoto
parameters:
- name: omega0
value: 0.1875
state:
theta: 0.1875
- id: 6
dynamics: Kuramoto
parameters:
- name: omega0
value: 0.3125
state:
theta: 0.3125
- id: 7
dynamics: Kuramoto
parameters:
- name: omega0
value: 0.4375
state:
theta: 0.4375
coupling:
KuramotoCoupling:
name: KuramotoCoupling
label: "Kuramoto sinusoidal coupling"
description: >
Antisymmetric coupling: K sin(theta_src - theta_dst).
The AntiSymmetric wrapper ensures g_src = -g_dst.
delayed: false
parameters:
K:
label: "Coupling strength"
value: 3.0
unit: "1"
description: "Global coupling strength"
pre_expression:
rhs: "K * sin(x_j - x_i)"
# -- Integration ---------------------------------------------------------------
integration:
description: "Explicit Runge-Kutta (Tsit5) with dt=0.05 over t in [0, 10]"
method: Tsit5
step_size: 0.05
duration: 10.0
Heterogeneous Kuramoto Network
Three vertex types on a ring: standard, static, and inertia
Replicates the full NetworkDynamics.jl Heterogeneous System tutorial — an 8-node ring network with three different vertex types:
- Kuramoto (6 nodes): standard phase oscillator \(\dot{\theta} = \omega_0 + \text{esum}\)
- StaticNode (1 node): no dynamics, outputs a fixed phase parameter
- KuramotoInertia (1 node): second-order oscillator with angular velocity \(\dot{\omega} = \omega_0 - \omega + \text{esum}\)
Per-node parameter overrides set heterogeneous natural frequencies.
YAML Specification
Model Report
Heterogeneous Kuramoto Network
Kuramoto oscillators with three vertex types: standard Kuramoto oscillators (6 nodes), one static node with fixed phase output, and one oscillator with inertia (second-order dynamics). Demonstrates heterogeneous vertex assignment on a Watts-Strogatz ring network. Recreates the NetworkDynamics.jl Heterogeneous System tutorial.
1. Brain Network: 8-node ring (Watts-Strogatz k=2, p=0)
Regular ring lattice: each node connected to 2 nearest neighbours. Equivalent to watts_strogatz(8, 2, 0) in Graphs.jl.
- Regions: 8
Coupling: Kuramoto sinusoidal coupling
Antisymmetric coupling: K sin(theta_src - theta_dst). The AntiSymmetric wrapper ensures g_src = -g_dst.
Receives \(\theta\) from connected regions.
Pre-synaptic: \(c_{\text{pre}} = - K \cdot \sin{\left(x_{i} - x_{j} \right)}\)
| Parameter | Value | Description |
|---|---|---|
| \(K\) | 3.0 | Global coupling strength |
2. Local Dynamics: Kuramoto phase oscillator
Standard Kuramoto oscillator: dtheta/dt = omega0 + esum. The model comprises 1 state variables.
2.1 State Equations
\[\dot{\theta} = c_{coupling} + \omega_{0}\]
2.2 Parameters
| Parameter | Value | Unit | Description |
|---|---|---|---|
| \(\omega_{0}\) | 0.0 | rad_per_s | Intrinsic angular frequency of the oscillator |
3. Numerical Integration
- Method: Tsit5
- Time step: \(\Delta t = 0.05\) ms
- Duration: 10.0 ms
References
Cabral, J., Hugues, E., Sporns, O., & Deco, G. (2011). Role of local network oscillations in resting-state functional connectivity. NeuroImage, 57(1), 130-139.
Kuramoto, Y. (1975). Self-entrainment of a population of coupled non-linear oscillators. Lecture Notes in Physics, 420-422.
Strogatz, S. (2000). From kuramoto to crawford: exploring the onset of synchronization in populations of coupled oscillators. Physica D: Nonlinear Phenomena, 143(1–4), 1-20. - https://juliadynamics.github.io/NetworkDynamics.jl/stable/generated/heterogeneous_system/ - Kuramoto, Y. (1975). Self-entrainment of a population of coupled non-linear oscillators.
Generated Julia Code
from tvbo import SimulationExperiment
exp = SimulationExperiment.from_file("yaml/heterogeneous_kuramoto.yaml")
Code(exp.render_code("networkdynamics"), language='julia')using Graphs
using NetworkDynamics
using OrdinaryDiffEqTsit5
function Kuramoto_f!(dx, x, esum, (omega0,), t)
theta = x[1]
c_coupling = esum[1]
dx[1] = c_coupling + omega0
nothing
end
vertex_Kuramoto = VertexModel(;
f = Kuramoto_f!,
g = StateMask(1:1),
sym = [:theta],
psym = [:omega0 => 0.0],
name = :Kuramoto,
)
function KuramotoInertia_f!(dx, x, esum, (omega0,), t)
omega, theta = x
c_coupling = esum[1]
dx[1] = c_coupling + omega0 - 1.0 * omega
dx[2] = omega
nothing
end
vertex_KuramotoInertia = VertexModel(;
f = KuramotoInertia_f!,
g = StateMask(2:2),
sym = [:omega, :theta],
psym = [:omega0 => 0.0],
name = :KuramotoInertia,
)
function StaticNode_g!(out, x, p, t)
out .= p
nothing
end
vertex_StaticNode = VertexModel(;
g = StaticNode_g!,
outsym = [:theta],
psym = [:theta_fix],
ff = NoFeedForward(),
name = :StaticNode,
)
function KuramotoCoupling_edge_g!(e_dst, v_src, v_dst, (K,), t)
e_dst[1] = -K .* sin(v_dst[1] - v_src[1])
nothing
end
edge_KuramotoCoupling = EdgeModel(;
g = AntiSymmetric(KuramotoCoupling_edge_g!),
outsym = [:coupling],
psym = [:K => 3.0],
name = :KuramotoCoupling,
)
g = watts_strogatz(8, 2, 0)
vertex_array = VertexModel[vertex_Kuramoto for _ in 1:8]
vertex_array[1] = vertex_StaticNode
vertex_array[5] = vertex_KuramotoInertia
nw = Network(g, vertex_array, edge_KuramotoCoupling; dealias=true)
s = NWState(nw)
s.p.v[1, :theta_fix] = -0.4375
s.v[2, :theta] = -0.3125
s.p.v[2, :omega0] = -0.3125
s.v[3, :theta] = -0.1875
s.p.v[3, :omega0] = -0.1875
s.v[4, :theta] = -0.0625
s.p.v[4, :omega0] = -0.0625
s.v[5, :omega] = 5.0
s.v[5, :theta] = 0.0625
s.p.v[5, :omega0] = 0.0625
s.v[6, :theta] = 0.1875
s.p.v[6, :omega0] = 0.1875
s.v[7, :theta] = 0.3125
s.p.v[7, :omega0] = 0.3125
s.v[8, :theta] = 0.4375
s.p.v[8, :omega0] = 0.4375
tspan = (0.0, 10.0)
prob = ODEProblem(nw, uflat(s), tspan, pflat(s))
sol = solve(prob, Tsit5(); saveat=0.05)
adj_matrix = Float64.(adjacency_matrix(g))
using Random: MersenneTwister
function spring_layout(g; seed=42, iterations=50, k=1.0)
rng = MersenneTwister(seed)
n = nv(g)
pos = randn(rng, n, 2)
for _ in 1:iterations
disp = zeros(n, 2)
for i in 1:n, j in (i+1):n
d = pos[i, :] - pos[j, :]
dist = max(norm(d), 0.01)
rep = k^2 / dist
disp[i, :] .+= d / dist * rep
disp[j, :] .-= d / dist * rep
end
for e in edges(g)
i, j = src(e), dst(e)
d = pos[j, :] - pos[i, :]
dist = max(norm(d), 0.01)
att = dist^2 / k
disp[i, :] .+= d / dist * att
disp[j, :] .-= d / dist * att
end
for i in 1:n
dl = max(norm(disp[i, :]), 0.01)
pos[i, :] .+= disp[i, :] / dl * min(dl, 0.1)
end
end
return pos
end
using LinearAlgebra: norm
node_positions = spring_layout(g)
using Plots
plot(sol; ylabel="state", xlabel="time", title="Kuramoto on 8-node network")
Run & Plot
ts = exp.run(format="networkdynamics")
ts.plot()Detected IPython. Loading juliacall extension. See https://juliapy.github.io/PythonCall.jl/stable/compat/#IPython