from tvbo import Dynamicsfrom IPython.display import Markdown, display# Create a Van der Pol oscillator model in TVBOvdp = Dynamics("Dynamics")vdp.name ="VanDerPol"vdp.description ="Van der Pol oscillator - a classical nonlinear oscillator"# Add parametersvdp.add_parameter("mu", value=5.0, description="Damping constant")# Add state variables with their differential equationsvdp.add_state_variable("x", equation="z", initial_value=0.0, description="Position")vdp.add_state_variable("z", equation="mu*(1 - x**2)*z - x", initial_value=1.0, description="Velocity")# Display model summary using generate_reportdisplay(Markdown(vdp.generate_report(format="markdown")))
VanDerPol
Van der Pol oscillator - a classical nonlinear oscillator
State Equations
\[
\dot{x} = z
\]\[
\dot{z} = - x + \mu*z*\left(1 - x^{2}\right)
\]
Parameters
Parameter
Value
Unit
Description
\(\mu\)
5.0
N/A
Damping constant
Step 2: Export to PyRates and Simulate
import osimport shutilimport matplotlib.pyplot as pltfrom pyrates import CircuitTemplate, clear
# Export TVBO model to PyRates formatos.makedirs('_pyrates_vdp', exist_ok=True)withopen('_pyrates_vdp/__init__.py', 'w') as f: f.write('')pyrates_yaml = vdp.to_yaml(format="pyrates", filepath='_pyrates_vdp/vdp.yaml')# Display exported code using render_codeprint("=== Generated Python Code ===")print(vdp.render_code(format="python"))
=== Generated Python Code ===
import numpy as np
import scipy.special
def VanDerPol(
current_state,
t,
mu=5.0,
stimulus=False,
):
stim_t = stimulus(t) if stimulus else 0.0
# State variables
x = current_state[0]
z = current_state[1]
# Derivatives
dx_dt = z
dz_dt = -x + mu * z * (1 - x**2)
derivatives = np.array([dx_dt, dz_dt])
return derivatives
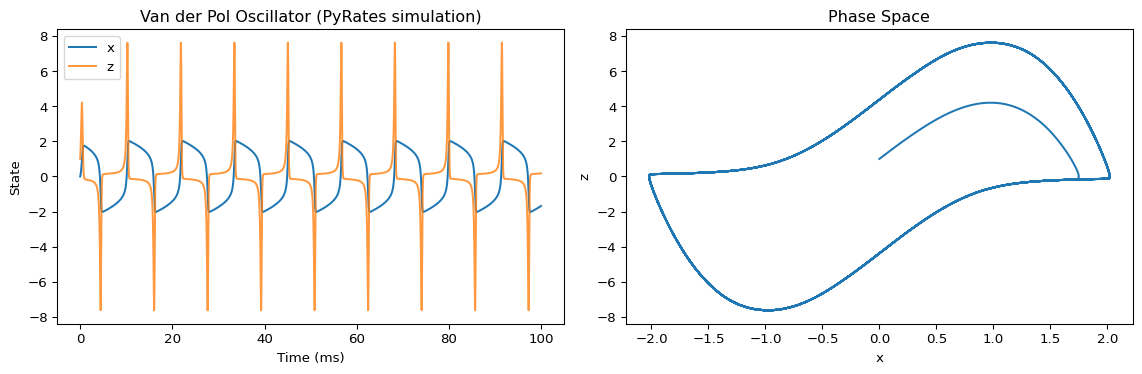
# Run in PyRatesT =100.0step_size =1e-2print("Running TVBO-exported model in PyRates...")model = CircuitTemplate.from_yaml('_pyrates_vdp.vdp.VanDerPol_circuit')results = model.run( step_size=step_size, simulation_time=T, outputs={'x': 'p/VanDerPol_op/x', 'z': 'p/VanDerPol_op/z'}, solver='scipy', method='RK45', vectorize=False, # Required for single-node circuits (PyRates bug))clear(model)shutil.rmtree('_pyrates_vdp')# Plot resultsfig, axes = plt.subplots(1, 2, figsize=(12, 4))axes[0].plot(results['x'], label='x')axes[0].plot(results['z'], label='z', alpha=0.8)axes[0].set_xlabel('Time (ms)')axes[0].set_ylabel('State')axes[0].set_title('Van der Pol Oscillator (PyRates simulation)')axes[0].legend()axes[1].plot(results['x'], results['z'])axes[1].set_xlabel('x')axes[1].set_ylabel('z')axes[1].set_title('Phase Space')plt.tight_layout()plt.show()
Running TVBO-exported model in PyRates...
Compilation Progress
--------------------
(1) Translating the circuit template into a networkx graph representation...
...finished.
(2) Preprocessing edge transmission operations...
...finished.
(3) Parsing the model equations into a compute graph...
...finished.
Model compilation was finished.
Simulation Progress
-------------------
(1) Generating the network run function...
(2) Processing output variables...
...finished.
(3) Running the simulation...
...finished after 0.0567435419998219s.
Step 3: Load Back into TVBO
import tempfilefrom IPython.display import Markdown, display# Save to file and reloadwith tempfile.TemporaryDirectory() as tmpdir: filepath = os.path.join(tmpdir, "vanderpol.yaml") vdp.to_yaml(format="pyrates", filepath=filepath)# Load back into TVBO loaded = Dynamics.from_pyrates(filepath)# Display loaded model using generate_reportprint("=== Loaded Model Report ===") display(Markdown(loaded.generate_report(format="markdown")))
=== Loaded Model Report ===
VanDerPol
Van der Pol oscillator - a classical nonlinear oscillator
State Equations
\[
\dot{x} = z
\]\[
\dot{z} = - x + \mu*z*\left(1 - x^{2}\right)
\]
Parameters
Parameter
Value
Unit
Description
\(\mu\)
5.0
N/A
None
Step 4: Run in TVBO
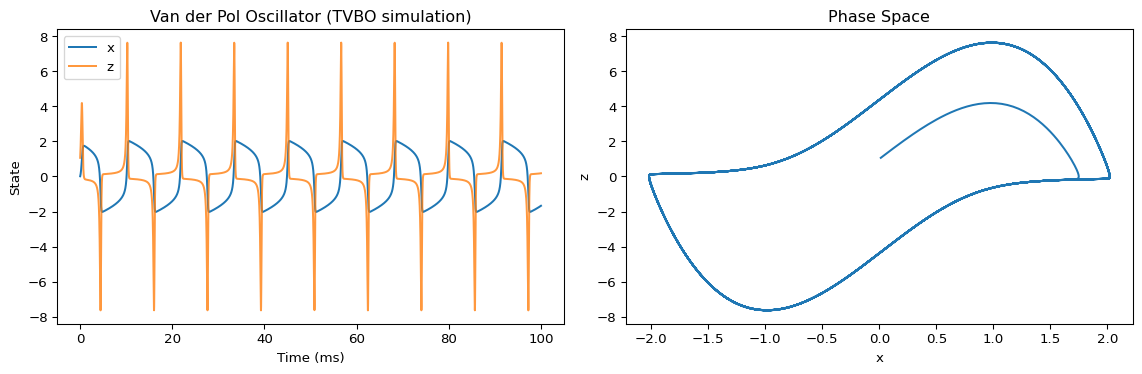
from tvbo import SimulationExperimentfrom IPython.display import Markdown, display# Run the loaded model in TVBOexp = SimulationExperiment( dynamics=loaded,)exp.integration.duration=100# Display experiment reportdisplay(Markdown(exp.generate_report(format="markdown")))result = exp.run().integration# Plot TVBO simulationfig, axes = plt.subplots(1, 2, figsize=(12, 4))time = result.timex = result.data.isel(variable=0).valuesz = result.data.isel(variable=1).valuesaxes[0].plot(time, x, label="x")axes[0].plot(time, z, label="z", alpha=0.8)axes[0].set_xlabel("Time (ms)")axes[0].set_ylabel("State")axes[0].set_title("Van der Pol Oscillator (TVBO simulation)")axes[0].legend()axes[1].plot(x, z)axes[1].set_xlabel("x")axes[1].set_ylabel("z")axes[1].set_title("Phase Space")plt.tight_layout()plt.show()
Simulation Experiment
1. Brain Network
Regions: 1
Conduction velocity: 3.0 mm_per_ms
2. Local Dynamics: VanDerPol
Van der Pol oscillator - a classical nonlinear oscillator. The model comprises 2 state variables.
2.1 State Equations
\[\dot{x} = z\]
\[\dot{z} = - x + \mu \cdot z \cdot \left(1 - x^{2}\right)\]
from tvbo import Dynamicsfrom IPython.display import Markdown, display# Load an existing PyRates model (Van der Pol oscillator from PyRates)import model_templatesvdp_pyrates_path = os.path.join(os.path.dirname(model_templates.__file__), "oscillators", "vanderpol.yaml")# Load into TVBO (loads the first operator)vdp_imported = Dynamics.from_pyrates(vdp_pyrates_path)# Display using generate_reportdisplay(Markdown(vdp_imported.generate_report(format="markdown")))
vdp
State Equations
\[
\dot{x} = z
\]\[
\dot{z} = inp - x + \mu*z*\left(1 - x^{2}\right)
\]
Parameters
Parameter
Value
Unit
Description
\(\mu\)
1.0
N/A
None
\(inp\)
0.0
N/A
None
Step 2: Modify in TVBO and Display Code
from IPython.display import Markdown, display# Modify parameter in TVBOvdp_imported.parameters['mu'].value =2.5# Change damping# Display the generated Python code using render_codeprint("=== Generated Python Code ===")print(vdp_imported.render_code(format="python"))
=== Generated Python Code ===
import numpy as np
import scipy.special
def vdp(
current_state,
t,
mu=2.5,
inp=0.0,
stimulus=False,
):
stim_t = stimulus(t) if stimulus else 0.0
# State variables
x = current_state[0]
z = current_state[1]
# Derivatives
dx_dt = z
dz_dt = inp - x + mu * z * (1 - x**2)
derivatives = np.array([dx_dt, dz_dt])
return derivatives
Step 3: Run in TVBO
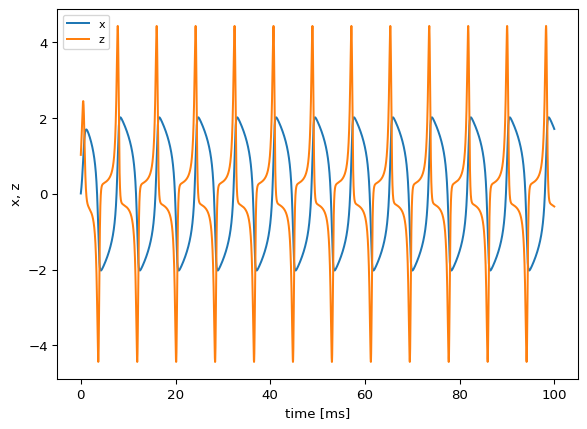
from IPython.display import Markdown, display# Run the modified model in TVBOexp = SimulationExperiment( dynamics=vdp_imported,)exp.integration.duration=100# Display experiment configurationMarkdown(exp.generate_report(format="markdown"))
Simulation Experiment
1. Brain Network
Regions: 1
Conduction velocity: 3.0 mm_per_ms
2. Local Dynamics: vdp
The model comprises 2 state variables.
2.1 State Equations
\[\dot{x} = z\]
\[\dot{z} = inp - x + \mu \cdot z \cdot \left(1 - x^{2}\right)\]
import tempfilewith tempfile.TemporaryDirectory() as tmpdir:# Export modified model back to PyRates filepath = os.path.join(tmpdir, "vdp_modified.yaml") vdp_imported.to_yaml(format="pyrates", filepath=filepath)# Display exported YAMLprint("=== Modified model exported to PyRates YAML ===")withopen(filepath, 'r') as f:print(f.read())